






Studio sul braccio robotico per afferrare oggetti con pesi e forme diversi
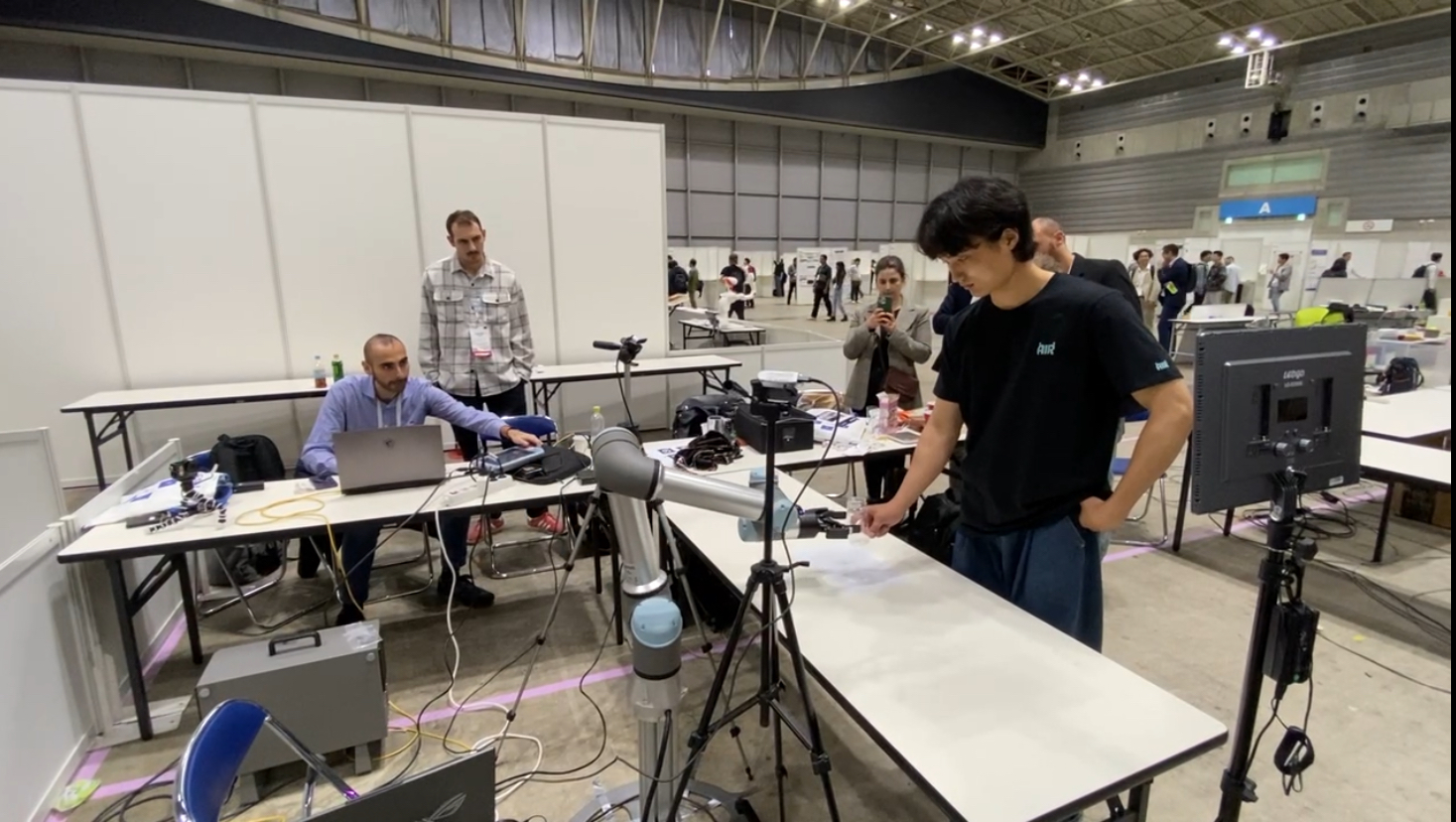
SIENA. Il team del Siena Robotics and Systems Lab dell’Università di Siena (SIRSLab) ha vinto la competizione internazionale “IEEE ICRA 2024 Competition on Human-to-Robot Handovers“, assieme ai colleghi dell’IIT di Genova “SIRSIIT”. Il premio è stato consegnato al team lo scorso 16 maggio a Yokohama, in Giappone.

 La competizione si è tenuta nell’ambito della nona edizione della “Robotic Grasping and Manipulation Competition” all’interno della più importante conferenza di robotica a livello internazionale, IEEE ICRA.
La competizione si è tenuta nell’ambito della nona edizione della “Robotic Grasping and Manipulation Competition” all’interno della più importante conferenza di robotica a livello internazionale, IEEE ICRA.
Il team ha progettato e implementato un framework di controllo e percezione che permette ad un braccio robotico di afferrare, in modo rapido ed affidabile, oggetti con diversi pesi e forme non appena la persona con cui collabora glieli porge.
Fanno parte della squadra che ha effettuato lo studio: Enrico Turco, Valerio Bo, Chiara Castellani, Maria Pozzi, Gionata Salvietti.
Il lavoro è stato supervisionato da Domenico Prattichizzo e Monica Malvezzi dell’Università di Siena. Un ringraziamento va anche al professor Gabriele Costante dell’Università di Perugia per gli studi iniziali sul problema, mentre Alessio Xompero (Queen Mary University of London) e altri organizzatori della gara hanno supportato il team dal punto di vista logistico. I ricercatori dell’IIT di Genova hanno aiutato il team con il setup sperimentale, in particolare Nikos Tsagarakis (HHCM Lab) e Arash Ajoudani (HRI² Lab).
Il lavoro fatto è stato supportato dai progetti europei HARIA (cordis.europa.eu/project/id/101070292) e REGO (cordis.europa.eu/project/id/101070066) e dal progetto NextGeneration EU PNRR THE – Spoke 9 (www.tuscanyhealthecosystem.it/)